Anny Astrid Espitia-Cubillosa, Robinson Jiménez-Morenob, Esperanza Rodríguez-Carmonaa
aIndustrial Engineering Program, New Granada Military University, Bogotá, Colombia.
bMechatronics Engineering Program, New Granada Military University, Bogotá, Colombia.
Corresponding author: anny.espitia@unimilitar.edu.co
Vol. 04, Issue 02 (2025): October
ISSN-e 2953-6634
ISSN Print: 3073-1526
Submitted: September 05, 2025
Revised: October 06, 2025
Accepted: October 06, 2025
Espitia-Cubillos, A. et al. (2025). Analysis of scientific papers related to intelligent forklifts. EASI: Engineering and Applied Sciences in Industry, 4 (2), 9-17. https://doi.org/10.53591/easi.v4i2.2602
This document shows an analysis of documents related to intelligent forklifts, which seeks to identify the advances in the field and recognize the existing knowledge gap in the area to support the future design of a forklift that, based on artificial intelligence algorithms, can operate with certain autonomy and be called an intelligent forklift. The PRISMA 2020 guide is used for the search, selection, evaluation and summary of findings of the papers. We start with the search in the Scopus database, defining inclusion criteria to limit the study. The documents are characterized, then an analysis of their bibliographic networks is made using Wosviewer, after which their summaries are studied with Voyant, to succinctly present the main findings. It is concluded that it is important to promote collaborative work among authors, organizations and countries, to complement the advances in forklifts, their routing and movement planning using artificial intelligence tools, such as convolutional or transformer type networks.
Keywords: Artificial intelligence, Documental analysis, Documents, Intelligent forklifts, Inventories.
This analysis is developed to contribute to the future structuring of a handling system for raw materials and finished products that includes the automation of inventory control processes, thus promoting the benefits of Industry 4.0 in the strengthening of manufacturing processes. Industry 4.0 promotes the search for the convergence of physical and digital scenarios. This will allow materializing such convergence within manufacturing companies, considering that, according to (García Amen, 2022), the integration of machines and people is leading to an environment that simultaneously brings together the performance of people with artificial intelligence, a scenario to which the industrial sector is no stranger, in this regard (Ruesgas, 2019), points out that such convergence corresponds to a trend in the supply chain, which according to (Gopireddy, 2024) has led to the achievement of high standards of operational efficiency, automation and intelligence. Proper inventory location and management contribute to achieving an efficient production process, synchronizing each stage for its improvement (Fernandez-Albujar, La Rosa-Arízaga, & Flores-Perez, 2022). Inventory handling is an important element in any manufacturing process, its proper management contributes to the success of the production process, and therefore to the success of the whole organization. The use of artificial intelligence algorithms in forklifts allows the automatic registration of the quantity of product in the inventory and its location in the warehouse, considering the characteristics of the product and the conditions of its handling. To design an intelligent forklift, it is important to know the current state of the art to identify the advances in the field and to recognize the existing knowledge gap in the area.
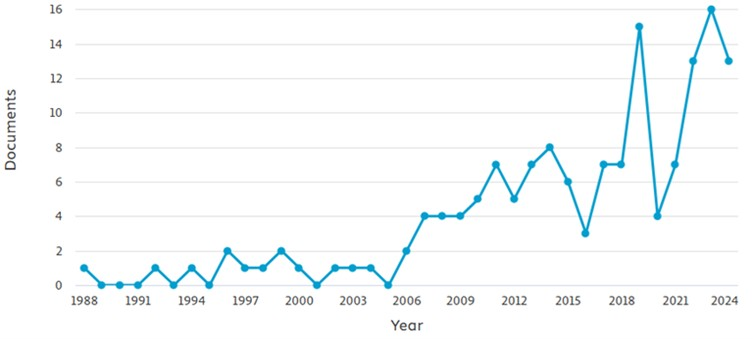
The PRISMA 2020 guide (Page, et al., 2021) is used for the search, selection, evaluation and summary of findings, in a transparent way, of scientific publications related to intelligent forklifts that allows know the current state of the art. A document search is performed in the Scopus database where the title, abstract and/or keywords are consulted, using the initial search equation “intelligent forklift” which yields a total of 14 documents with publications since 1997. To broaden the search, the equation was changed to intelligent AND forklift, finding 150 records whose behavior is presented in Figure 1.
There, the absence of publications in 7 years and their recent growth is highlighted, so the analysis is limited to the last 6 years given that in 2019 there were 15 publications. The documents of the thematic areas Agricultural and Biological Sciences, Chemical Engineering, Social Sciences, Energy, Medicine, Chemistry, Biochemistry, Genetics and Molecular Biology, Environmental Sciences, Earth and Planetary Sciences are eliminated, limiting the study to 67 documents. The last query in Scopus was performed on 01/23/2025. The work begins with a general characterization of the selected documents, followed by an analysis using the software Wosviewer for the construction of bibliographic networks, then the abstracts of the documents are studied with Voyant, and finally, the main findings are presented in a concise manner.
Four inclusion criteria were defined: 1) to be a scientific paper published in Scopus, 2) to have been published since 2019, 3) to comply with the determined search equation, and 4) to be part of the thematic areas: Engineering, Computer Science, Mathematics, Physics and Astronomy, Materials Science and/or Decision Sciences. Figure 2. shows the flow chart of the document selection process.
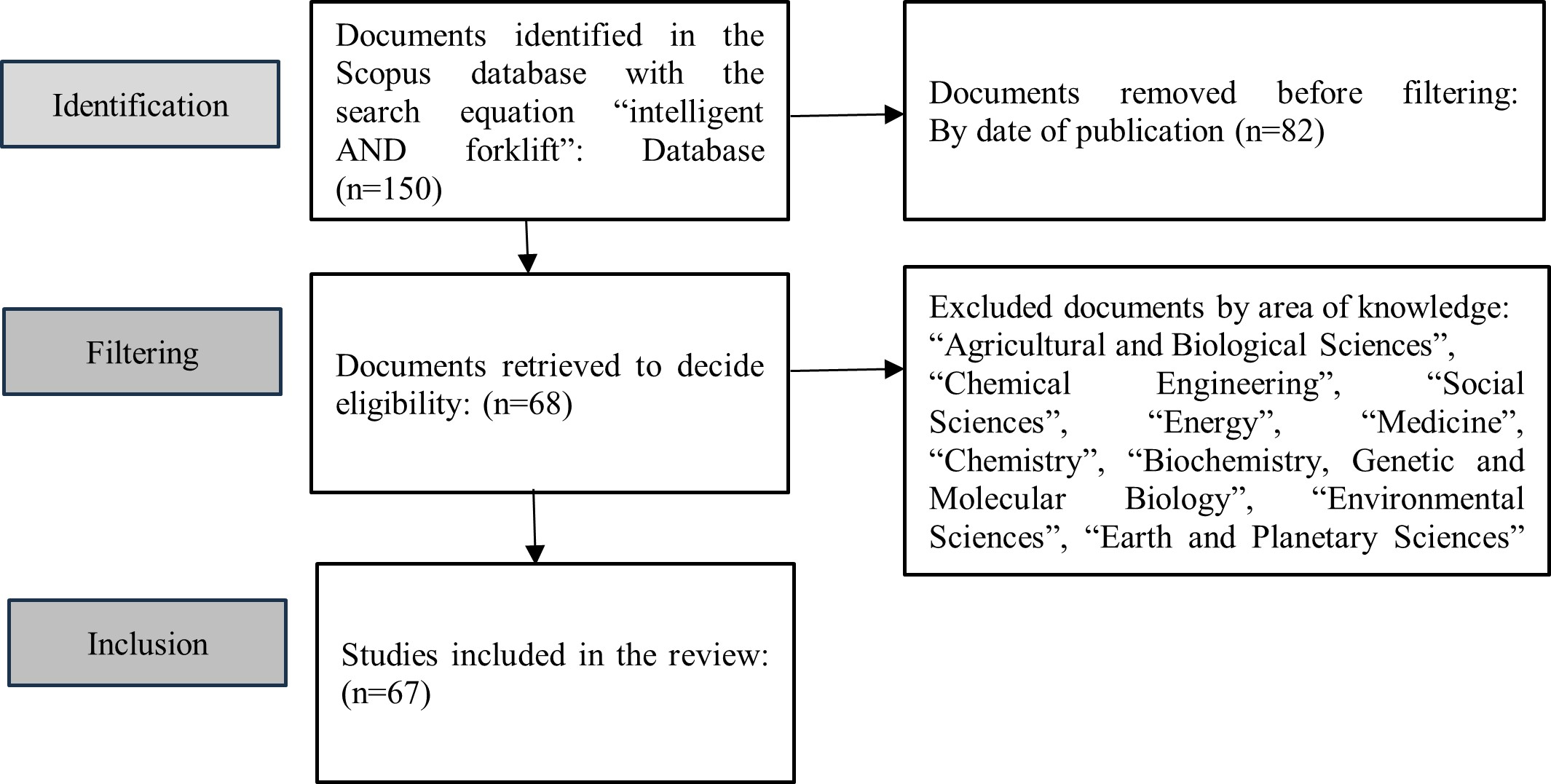
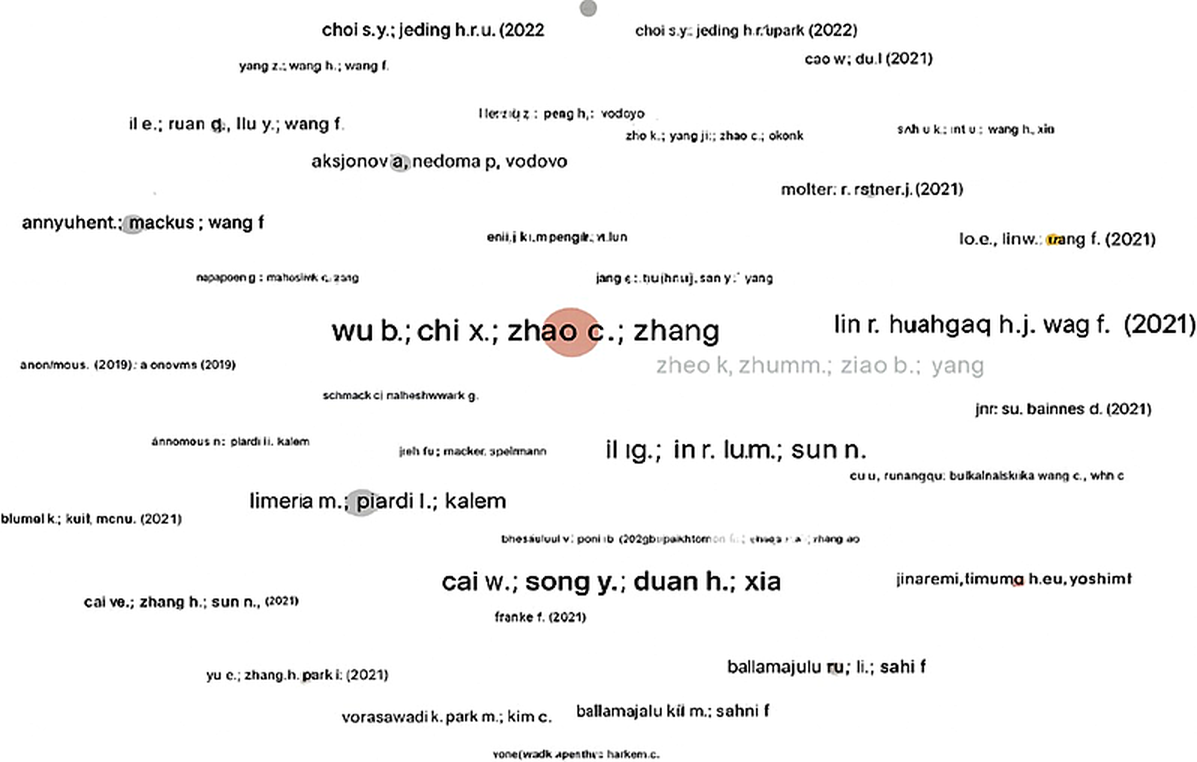
Overall, 25 scientific articles, 1 book chapter, 37 conference proceedings, 3 conference reviews and 1 review are included. The papers together have been cited in 210 articles, 67 conference papers and 10 review papers. With the bibliographic data of the 67 papers that simultaneously met the defined inclusion criteria, using Wosviewer, the networks presented and analyzed below were constructed. Figure 3 shows the co-authorship graph of the selected papers. Figure 3 presents the absence of collaboration among researchers, however, authors such as (Ho & Ulfitria, 2022) who develop an anti-lock braking system for autonomous vehicles to prevent accidents in heavy trucks and forklifts; (Liu, Liang, & Pan, 2022) develop an automatic system using intelligent forklifts that autonomously check parking spaces and move with precision without obstacles; (Arfianto, et al, 2019) propose a flexible LED light system that moves with forklifts minimizing accidents; (Li, Xu, Peng, Wang, & Huang, 2022) design an algorithm applied in intelligent forklifts to identify goods in boxes; (Aksjonov, Nedoma, Vodovozov, Raud, & Petlenkov, 2019) focus on cruise control systems for electric vehicles on the road, tracking and performing controller adjustments directly in the driving process.
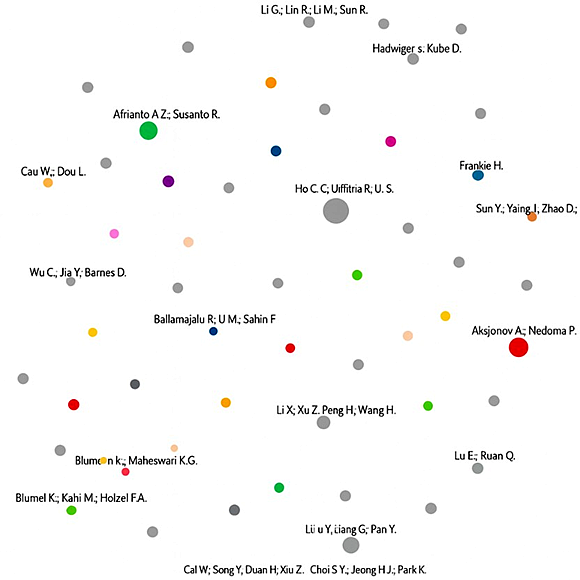
Figure 4 shows the Cooccurrence network of keywords when they appear in more than five documents. Figure 4 displays three keyword co-occurrence clusters represented in green, red and blue, the relationship is symbolized in the network by means of the arcs. The green cluster has as node “vehicles with automatic guidance” and additionally groups the concepts: autonomous vehicles, intelligent robots, mobile robots and automatically guided vehicles. The red cluster whose node is “material handling equipment” also integrates the keywords: current, warehouses, intelligent systems, warehouse management and object management. Finally, the blue cluster whose node is the keyword “route planning” is also made up of intelligent vehicles on tracks and motion planning.
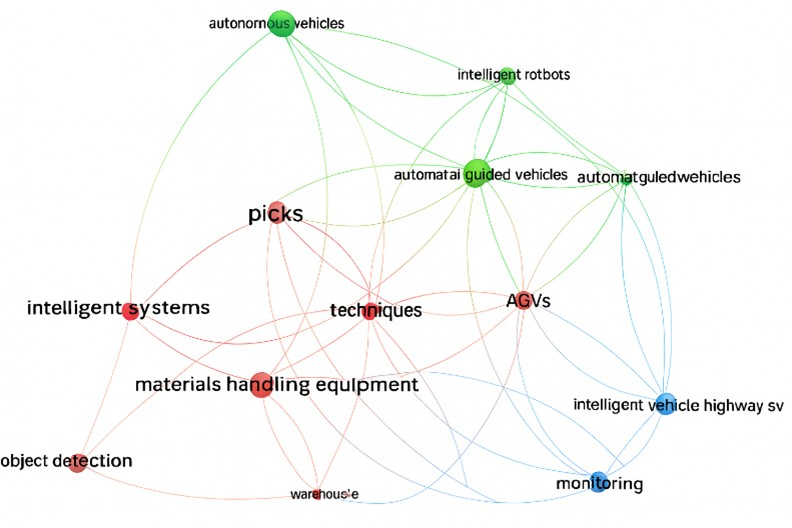
Figure 5 shows the graph of document citation behavior. Figure 5 illustrates the most cited papers, where (Wu, et al., 2022) proposes a dynamic hybrid route planning algorithm with 67 citations. (Zhao, et al, 2020) employ a forklift with a radio frequency and ultra-wideband identification system to determine merchandise information, a paper cited 59 times in other works. Also (Cai, Song, Duan, Xia, & Wei, 2022) proposes a multi-scale bi-directional attention neural network to identify forklift pallets and improve storage and transportation paper cited 36 times. The lecture by (Limeira, Piardi, Kalempa, De Oliveira, & Leitao, 2019) presents the WsBot robot with autonomous and intelligent behaviors and forklift-like features and is cited 23 times.
 >
>
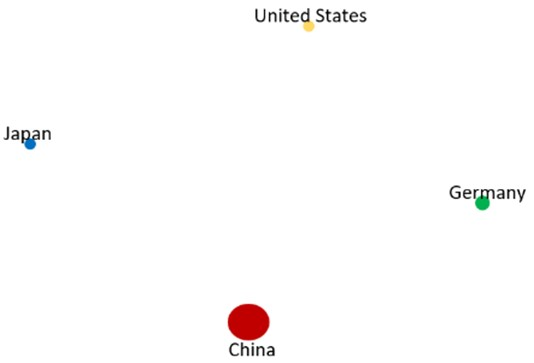
Figure 6 shows the graph representing citation of documents originating in different countries. The topic is addressed in papers cited by authors from the countries shown in Figure 6, China stands out with papers such as the one by (Ren, et al, 2022) who present an intelligent system for precision load transfer for pallet docking, followed by Germany with works such as the one by (Schreck, Reichert, Hetzel, Doll, & Sick, 2023) where a technique for free space estimation for the displacement of autonomous forklifts is presented. Then Japan with research such as that of (Chew, et al, 2019) where they present a human-machine interaction for a virtual environment evaluating interactions with a forklift. Finally, the United States has as an example the work presented by (Ballamajalu, et al, 2020) where they propose a dynamic path planner algorithm for mobile robots as forklifts. Although there is no relationship between countries, the graph indicates the volume of papers related to the topic.
While Figure 7 represents bibliographic pairing, there are connections of 6 referenced documents among the authors.

And Figure 8 shows the connection and relationship between the 3 organizations of the network, where the arcs denote the relationship between them and collaborative work.

The abstracts of the 67 documents underwent a content analysis with the tools available on the web page https://voyant-tools.org/. A total of 13,400 words were studied, with a vocabulary density of 0.193, a readability index of 16.389, and an average of 25.8 words per sentence. The cloud in Figure 9 shows the 100 most used words in the document abstracts, where the following stand out: forklift (100); smart (90); warehouse (64); based (62); method (61).

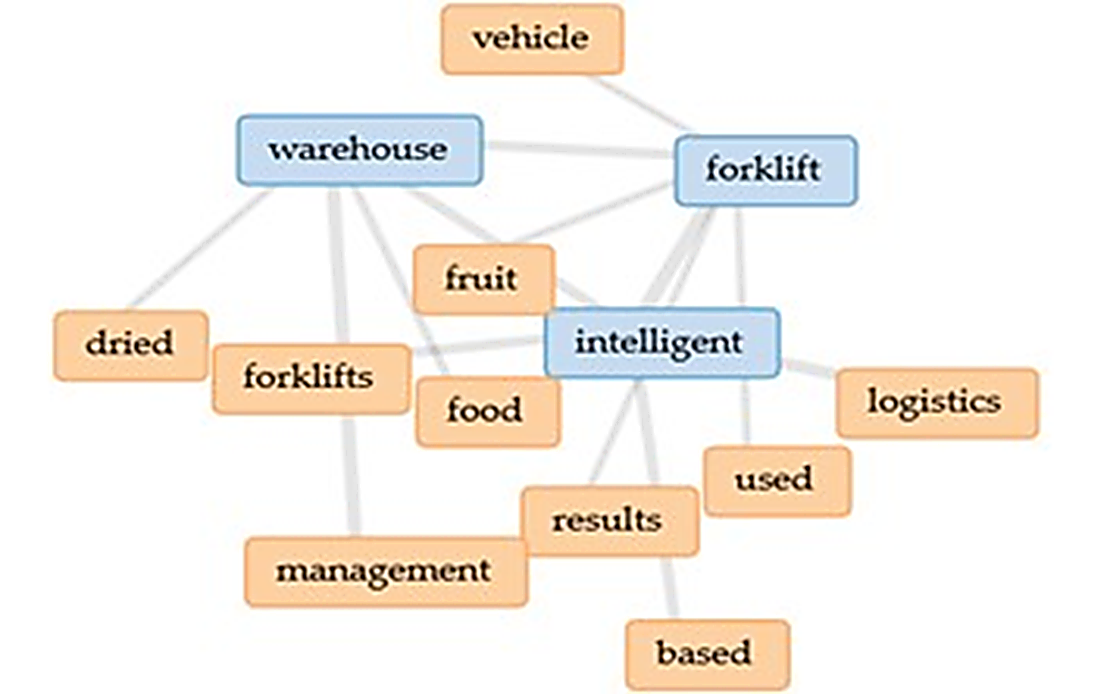
Finally, the connection between the most used words in the document abstracts (identified in Figure 9) is shown in Figure 10, where the concepts of storage, forklift and smart are the main elements.
The use of artificial intelligence is common around study under consideration. However, the inclusion of algorithms that provide vision to the forklift and allow it to navigate and operate with the environment with autonomy opens an opportunity for future work with the application of network architecture such as YOLO (Qureshi, et al, 2024) or ViT based on transformer networks (Dosovitskiy, et al, 2021) (Touvron, Cord, El-Nouby, Verbeek, & Jégou, 2022). Lo que puede ser complementado con aplicaciones de celular como la presentada por (Espitia-Cubillos, Vargas Duanca, and Jiménez-Moreno, 2025) para el control del prototipo de montacargas giratorio orientado a industria 5.0. When designing joint human-smart forklift actuation scenarios, it is important to make indoor spaces have a better convergence between the physical and digital worlds so that technological devices fit together properly (Carmosino, et al, 2021).
The analysis of the information presented leads to the conclusion that there is a lack of collaborative work between different authors, organizations and countries with respect to intelligent forklifts. Currently, the forklift is conceived as equipment that allows the handling of materials in warehouses, facilitating their management with intelligent systems. The main advances are presented in guided forklifts that can be autonomous, intelligent robots, mobile robots and automatically guided vehicles. Work has also been done on the routing and planning of intelligent forklift movements. This shows that it is possible to achieve convergence between the physical and digital worlds in manufacturing companies that use intelligent forklifts to contribute to better results in terms of efficiency thanks to automation supported by artificial intelligence algorithms. .
Product derived from the research project entitled “Diseño de un modelo de interacción humano robot mediante algoritmos de aprendizaje profundo”, code INV-ING-3971, financed by the Vice-Rectory of Research of the Universidad Militar Nueva Granada, 2024..
The authors declared no potential conflicts of interest within this research, authorship, and/or publication of this article.
Aksjonov, A., Gordienko, Y., Paramonov, S., Kotenko, I., & Drobintsev, P. (2019). Speed control of electric vehicle propulsion with autotuning at changeable driving modes and road conditions. 2019 IEEE International Conference on Mechatronics (ICM) (pp. 584–589). Ilmenau, Germany. https://doi.org/10.1109/ICMECH.2019.8722909
Arfianto, A., Wahyudi, S., Hidayat, T., & Ismail, M. (2019). Unmanned vehicles use received signal strength indicator (RSSI) in instant beverage industry. 2019 International Conference on Advanced Mechatronics, Intelligent Manufacture and Industrial Automation (ICAMIMIA) (pp. 340–343). Batu, Indonesia. https://doi.org/10.1109/ICAMIMIA47173.2019.9223401
Ballamajalu, R., Kumar, P., & Ramesh, C. (2020). Turn and orientation sensitive A* for autonomous vehicles in intelligent material handling systems. 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE) (pp. 606–611). Kong, China. https://doi.org/10.1109/CASE48305.2020.9216869
Cai, W., Li, J., Liu, Y., Zhang, H., & Zhao, Y. (2022). Multi-feature fusion-guided multiscale bidirectional attention networks for logistics pallet segmentation. CMES – Computer Modeling in Engineering and Sciences, 131(3), 1539–1555. https://doi.org/10.32604/cmes.2022.019785
Carmosino, G., Rossi, F., Bianchi, L., & Marino, S. (2021). Digital technologies in expanding the boundaries through immersive spaces: Case studies in vessel and yacht design. In T. Ahram, R. Taiar, K. Langlois, & A. Choplin (Eds.), Human interaction, emerging technologies and future applications III. IHIET 2020. Advances in intelligent systems and computing (Vol. 1253, pp. 290–296). Springer. https://doi.org/10.1007/978-3-030-55307-4_32
Chew, J., Lee, K., Wong, S., & Tan, H. (2019). Development of a virtual environment to realize human-machine interaction of forklift operation. 2019 7th International Conference on Robot Intelligence Technology and Applications (RiTA) (pp. 112–118). Daejeon, South Korea. https://doi.org/10.1109/RITAPP.2019.8932837
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn, D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer, M., Heigold, G., Gelly, S., Uszkoreit, J., & Houlsby, N. (2021). An image is worth 16x16 words: Transformers for image recognition at scale. International Conference on Learning Representations (ICLR 2021). Vienna, Austria. https://doi.org/10.48550/arXiv.2010.11929
Espitia-Cubillos, A. A., Vargas Duanca, L. M., & Jiménez-Moreno, R. (2025). Industry 5.0 oriented rotating forklift prototype for inventory handling. 2025 23rd LACCEI International Multi-Conference for Engineering, Education and Technology (LACCEI): Engineering, Artificial Intelligence, and Sustainable Technologies in Service of Society (p. 520). Mexico City, Mexico. https://doi.org/10.18687/LACCEI2025.1.1.520
Fernandez-Albujar, C., La Rosa-Arízaga, L., & Flores-Perez, A. (2022). Production management model based on lean manufacturing and BPM tools to increase profitability in SMEs in the plastic sector. 2022 8th International Engineering, Sciences and Technology Conference (IESTEC) (pp. 61–67). Panama: IEEE. https://doi.org/10.1109/IESTEC54539.2022.00018
García Amen, F. (2022). Cuando los robots hereden la Tierra. Una hipótesis hipersticional en torno a la cuarta revolución industrial fundada sobre el pasado y el presente de la convergencia físico–digital. Arquisur Revista, 12(21), 34–47. https://doi.org/10.14409/ar.v12i22.11186
Gopireddy, S. R. (2024). Cyber-physical cloud security: Protecting cloud-connected smart infrastructure. European Journal of Advances in Engineering and Technology, 11(2), 64–68.
Ho, C., & Ulfitria, R. (2022). Automatic anti-lock brake system for anti-rollover control of autonomous heavy-duty truck. 27th International Conference on Artificial Life and Robotics (ICAROB 2022) (pp. 635–640). Kunming, China. https://doi.org/10.1117/12.2653700
Li, X., Xu, Z., Peng, H., Wang, H., & Huang, Q. (2022). Box straight line detection method based on two PCA and DBSCAN. 2022 4th International Conference on Intelligent Information Processing (IIP) (pp. 147–154). Guangzhou, China. https://doi.org/10.1109/IIP57348.2022.00037
Limeira, M., Silva, T., Costa, R., & Pereira, J. (2019). WsBot: A tiny, low-cost swarm robot for experimentation on industry 4.0. 2019 Latin American Robotics Symposium, 2019 Brazilian Symposium on Robotics and 2019 Workshop on Robotics in Education (LARS/SBR/WRE) (pp. 293–298). Rio Grande, Brazil. https://doi.org/10.1109/LARS-SBR-WRE48964.2019.00058
Liu, Y., Liang, G., & Pan, Y. (2022). The internet of things new intelligent automatic parking system. 2022 2nd International Conference on Information Technology and Intelligent Control (CITIC) (p. 12346). Kunming, China. https://doi.org/10.1117/12.2653700
Page, M. J., McKenzie, J. E., Bossuyt, P. M., Boutron, I., Hoffmann, T. C., Mulrow, C. D., Shamseer, L., Tetzlaff, J. M., Akl, E. A., Brennan, S. E., Chou, R., Glanville, J., Grimshaw, J. M., Hróbjartsson, A., Lalu, M. M., Li, T., Loder, E. W., Mayo-Wilson, E., McDonald, S., … Moher, D. (2021). Declaración PRISMA 2020: Una guía actualizada para la publicación de revisiones sistemáticas. Revista Española de Cardiología, 74(9), 790–799. https://doi.org/10.1016/j.recesp.2021.06.016
Qureshi, A., Khan, M., Ali, Z., & Raza, S. (2024). Semantic segmentation and YOLO detector over aerial vehicle images. Computers, Materials & Continua, 80(2), 3315–3332. https://doi.org/10.32604/cmc.2024.052582
Ren, J., Zhang, Y., Li, H., & Wu, Q. (2022). Deep learning-based intelligent forklift cargo accurate transfer system. Sensors, 22(21), 8437. https://doi.org/10.3390/s22218437
Ruesgas, M. (2019). Tendencias e innovación en la supply chain: Convergencia del mundo físico y digital. Manutención y Almacenaje: Logística, Distribución, Transporte, 539, 18–19.
Schreck, S., Müller, P., Hoffmann, T., & Klein, R. (2023). In the context of autonomous forklifts, ensuring non-collision during travel, pick, and place operations is crucial. To accomplish this, the forklift must be able to detect and locate areas of free space and potential obstacles in its environment. 2023 11th International Conference on Control, Mechatronics and Automation (ICCMA) (pp. 171–176). Kristiansand, Norway. https://doi.org/10.1109/ICCMA59762.2023.10374705
Touvron, H., Cord, M., Douze, M., Massa, F., Sablayrolles, A., & Jegou, H. (2022). Three things everyone should know about vision transformers. European Conference on Computer Vision (ECCV 2022) (Vol. 13684, pp. 497–515). Milan, Italy. https://doi.org/10.1007/978-3-031-20053-3_29
Wu, B., Chen, Y., Li, X., & Zhou, H. (2022). Dynamic path planning for forklift AGV based on smoothing A* and improved DWA hybrid algorithm. Sensors, 22(18), 7079. https://doi.org/10.3390/s22187079
Zhao, K., Liu, H., Wang, J., & Sun, Y. (2020). Joint RFID and UWB technologies in intelligent warehousing management system. IEEE Internet of Things Journal, 7(2), 11640–11655. https://doi.org/10.1109/JIOT.2020.2998484