(a)Faculty of Mechanical Engineering and Production Sciences, Escuela Superior Politécnica del Litoral. Guayaquil, Ecuador, 09-01-5863.
(b)Department of Mechanical Engineering. Universidad Politécnica de Madrid. Madrid, Spain, 28006.
(c)Research and Innovation Coordination, Asociación de Becarios del Ecuador - ABREC. Quito, Ecuador, 170518.
Corresponding author: mrfajard@espol.edu.ec
Vol. 01, Issue 01 (2023): July
DOI: https://doi.org/ 10.53591/easi.v2i1.2176
ISSN 2953-6634
Submitted: June 18, 2023
Revised: July 16, 2023
Accepted: July 18, 2023
Engineering and Applied
Sciences in Industry
University of Guayaquil. Ecuador
Frequency/Year: 2
Web:
revistas.ug.edu.ec/index.php/easi
Email:
easi-publication.industrial@ug.edu.ec
How to cite this article:
Fajardo-Pruna, M. et al. (2023). Industry 4.0: An innovative manufacturing process on a Digital Twin Application. EASI: Engineering and Applied Sciences in Industry, 2(1), 1-10. https://doi.org/ 10.53591/easi.v2i1.2176
Articles in journal repositories are freely open in digital form. Authors can reproduce and distribute the work on any non-commercial site and grant the journal the right of first publication with the work simultaneously licensed under a CC BY-NC-ND 4.0.
Abstract. The fourth industrial revolution requires the process equipment to work together through the strategy of cyber-physical systems. This project aims to contribute to this revolution by presenting a tool and methodology for creating cyber-physical systems. A V-model was used for the design process, in which the digital twin of a 3PRS+XY+C machine tool was developed. It started by defining the requirements, the basis for creating the logical-functional structure. This structure was the guide for completing the behavioural models of each element, the cascade control, and the 3D design of the machine. The simulation was carried out with the digital twin ready to verify the correct operation. A position and speed test were performed with step start and a second order signal showing proper control and compliance with the setpoint. The tests performed show that the strategy used allowed the realisation of the digital twin that conforms to the cyber-physical system of the machine. Also, due to the design mode, the model is highly flexible, and its modular structure facilitates the changes. It is the right time to apply this strategy in the Ecuadorian industry and thus reduce the technological gap and increase international competitiveness.
Keywords: Industry 4.0, Digital Transformation, Micro-Manufacturing, Single Edge Micro-Cutting, Cyber-physical systems
Resumen. La cuarta revolución industrial requiere que las máquinas trabajen juntas a través de la estrategia de los sistemas ciber-físicos. Este trabajo contribuye a esta revolución presentando una herramienta y metodología que permite la creación de estos sistemas. Se utilizó un modelo virtual de una máquina herramienta en la que se desarrolló el gemelo digital. Se definió los requerimientos, a partir de esto se definió la estructura lógico-funcional. Esta estructura fue la guía para la creación de los modelos de comportamiento de cada elemento, el control en cascada y el diseño 3D de la máquina. Con el gemelo digital completo se realizaron simulaciones para verificar su correcto funcionamiento. Se ejecutó una prueba de posición y velocidad con arranque por pasos y una señal de segundo orden, esto mostró un correcto control y cumplimiento de la consigna. Las pruebas realizadas muestran que la estrategia utilizada permite la realización del gemelo digital que se ajusta al sistema ciber-físico de la máquina. Además, por su modo de diseño, el modelo es muy flexible y su estructura modular facilita los cambios. Este es el momento adecuado para aplicar esta estrategia en la industria ecuatoriana y así reducir la brecha tecnológica, aumentando la competitividad internacional.
Palabras claves: Industria 4.0, Transformación digital, Micro fabricación, Micro corte de filo único, Sistemas Ciber-Físicos
INTRODUCTION
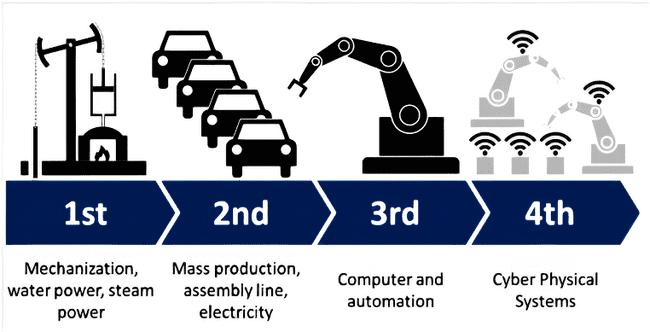
The ongoing digital transformation of the manufacturing sector, frequently referred to as Industry 4.0, has become an imperative rather than an option (Sleiti et al., 2022). Combining elements of automation, data exchange, and digital technologies, Industry 4.0 profoundly alters how we produce consumer goods. This disruptive shift empowers manufacturing systems with unprecedented levels of interconnectivity, autonomy, and efficiency, marking a new era in manufacturing that embraces intelligent systems and smart factories (Munirathinam, 2020). Figure 1 shows the evolution of the Industrial Revolution, which led towards the 4th Industrial Revolution (Stăncioiu, 2017).
Figure 1. Industrial Revolutions (Stăncioiu, 2017).
Industry 4.0 is built upon the pillars of advanced technologies such as the Internet of Things (IoT), Artificial Intelligence (AI), cloud computing, and robotics (Tutivén et al., 2021). These technologies transform manufacturing processes, promoting productivity, reducing waste, and enabling real-time decision-making (Gurjanov et al., 2020). At the core of this digital revolution is the IoT, which facilitates data exchange and communication between machines, systems, and humans (Rodriguez-Lucas et al., 2021). AI is indispensable in analysing the vast amounts of data generated, yielding actionable insights and predictive capabilities. Meanwhile, cloud computing provides the necessary infrastructure for data storage and computing power, while advanced robotics brings high automation and precision to production lines (Singh et al., 2019).
To achieve this technological advance, virtual models are needed for machine tools that allow real-time simulation of the processes developed in their actual peers (Nunez-Montoya et al., 2022). The Industrial Internet of Things (IIoT) monitors, collects, exchanges and analyses information (Boyes et al., 2018). These data are taken to a collaborative platform (3D Experience from Dassault Systèmes) with tools that link this information with its virtual model.
The interest that drives this work is to contribute to a global objective that points to the consolidation of Industry 4.0 since, at present, this is a visionary but realistic concept (Vaidya et al., 2018). One of the current challenges is modelling and analysing the systems since it seeks to reduce the dynamic equations as much as possible and obtain appropriate control models. These systems must be modelled as self-organised manufacturing systems (Sleiti et al., 2022).
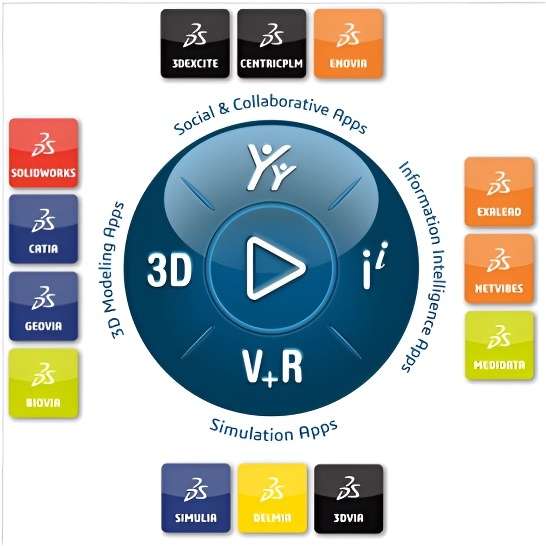
Dassault Systèmes has developed a collaborative environment (Figure 2) to work on the cloud, which offers the necessary means for the complete development of a virtual machine tool. This software allows the development of models that can be used for future work as tools that facilitate the development of cyber-physical systems.

Figure 2. Dassault Systèmes 3DExperience (TECHNIA (US), 2021).
Despite the numerous advantages of Industry 4.0, several challenges must be addressed. Cybersecurity concerns, interoperability between different systems, and the skills gap in the workforce represent significant obstacles that must be navigated for successful implementation. Understanding and developing strategies to overcome these challenges is vital for fully realising Industry 4.0's potential. Full integration of modern systems needs to be clustered in a wide variety of sub-systems applying the after mention technologies (United Nations Industrial Development Organization, 2016).
One of the integral parts of an Industry 4.0 sub-system is the cyber-physical model. These tools allow physical systems to have a complete virtual representation of the functionality and configurations of their equipment, commonly referred to as Digital Twins (Oks et al., 2019). These models represent a feedback loop between the virtual representation and physical counterparts. Figure 3 presents an illustration of how a cyber-physical model is formed.
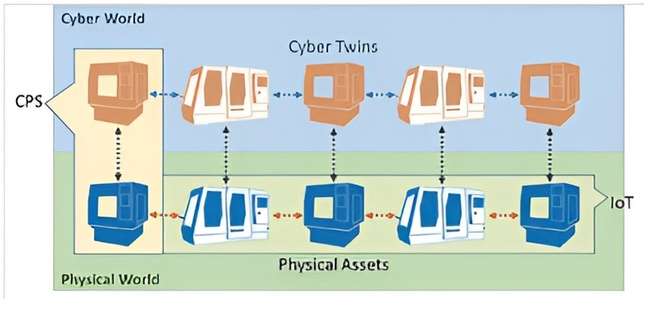
Figure 3. Representation of a cyber-physical model (Lee et al., 2015).
This new concept refers to industrial processes using Internet of Things (IoT) technologies within cyber-physical systems to achieve industrial objectives. The vision of the IIoT is that all the industry elements work as a single system of techniques, as seen in Figure 4, forming an intelligent manufacturing company (Leminen et al., 2020).
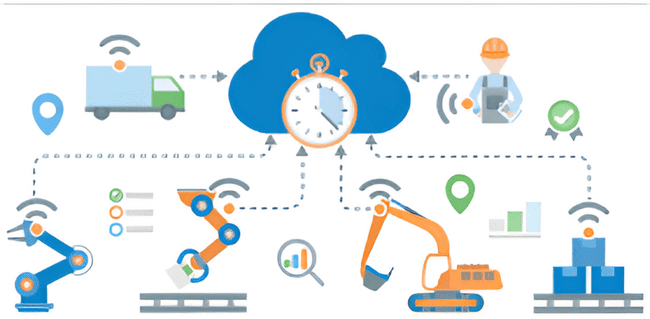
Figure 4. IIoT functioning diagram (QRAPP Technology Ltd, 2023).
This strategy results from difficulty in designing flexible manufacturing systems (FMS). The design of an FMS consists of making decisions based on business criteria. However, the current and future market needs a quick response, low costs for low-volume production and real-time scheduling. To supply this type of market, IMS proposes using holonomic and autonomous systems (Cronin et al., 2019).

Figure 5. Example of an Intelligent Manufacturing System. Own work.
METHODOLOGY
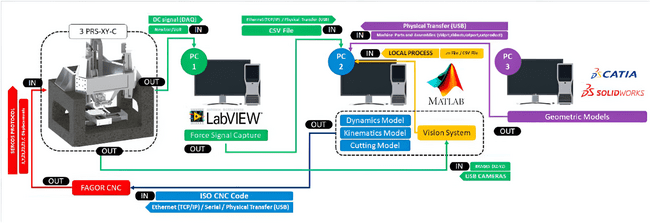
This study adopts a multifaceted approach to comprehensively investigate the applications and research directions in novel manufacturing processes under Industry 4.0. Two different ways could carry out the research methodology for this study; 1. working with other platforms (LabVIEW, SolidWorks, Matlab). This option generates responses from the data obtained (Figure 6a) or 2. through the synergistic design of a cyber-physical model within the same platform (3DExperience). This option generates responses from both simulations and data obtained from the physical model Figure 6b.
 |
|---|
| (a) |
 |
| (b) |
Figure 6. a) Comprehensive cyber-physical system design. Own work. b) Synergistic cyber-physical system design (TECHNIA (US), 2021).
For this study, a single-edged cutting machine is used, which has a system of three parallel axes to position the tool (López-Estrada et al., 2018). The parallel system has a prismatic, revolute and spherical joint (PRS) on each axis. This mechanism serves to orient the rotational axis C of the tool. In addition to expanding the operating range, it has an XY-stage that moves the workpiece (Fajardo-Pruna et al., 2019). Figure 7 is a representation without a casing of the machine.
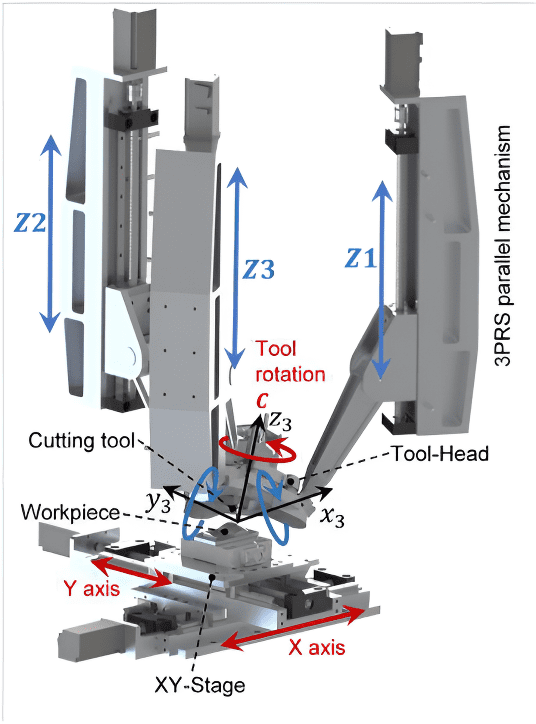
Figure 7. 3PRS+XY+C machine-tool (López-Estrada et al., 2019).
The second option stands out as it enables the creation of models closely attached to the physical design, is easily expandable from the control of the physical model to the virtual one and is highly flexible due to its block design for the control systems. The platform environment controls the communication between programs and systems, reducing information loss. The system requirements were managed and developed in tiers in the first stage using Enovia's requirements database tool. Figure 8 shows the requirements tree in a simplified way next to the Enovia framework.
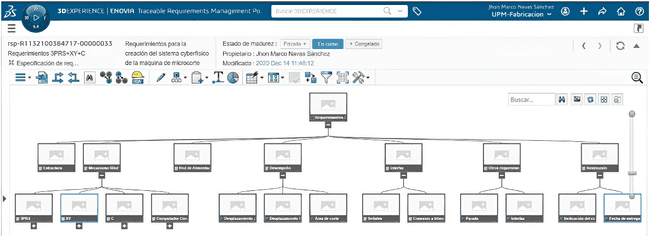
Figure 8. Structure of the simplified requirements tree. Own work.
The second stage was established based on the functional requirements. The objective was to analyse and represent the different functions that the system performs abstractly. At this design stage, it is sought to answer what the system would do (Ardito et al., 2019). The analysis started with the functional representation of a servomotor, expanding to a total of six actuators. Figure 9 shows the available diagram obtained and its corresponding relationships.
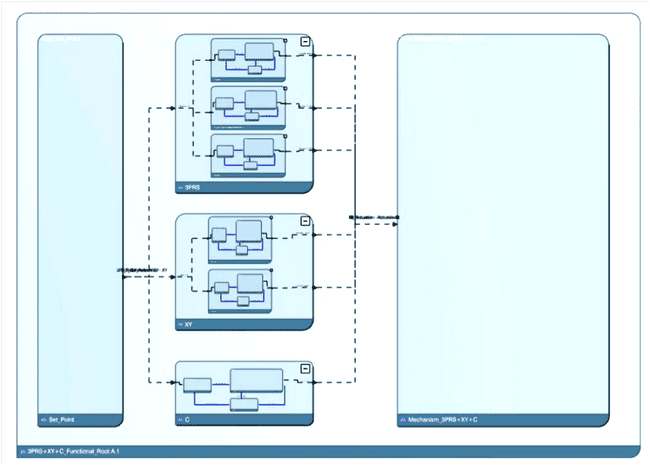
Figure 9. Structure of the functional diagram. Own work.
Finally, the design of the logical structure brings the abstract concept of the functional diagram to an implementation of the actual components (Lu et al., 2020). The elements' structural performance and logical connections were made at this stage. Figure 10 shows the complete logic diagram and the signal requirements of each block.
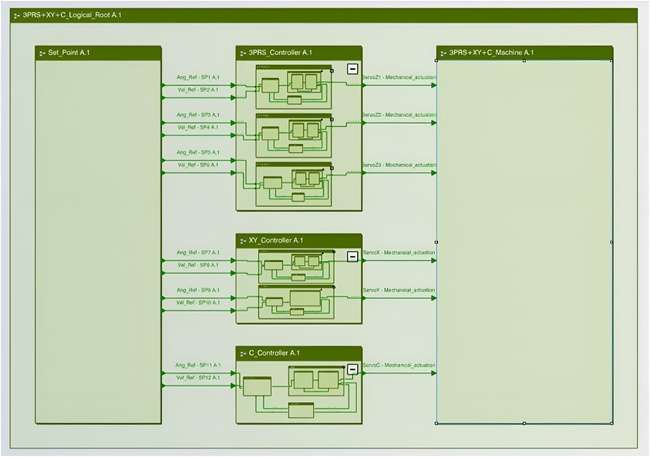
Figure 10. Logic Diagram Structure. Own work.
The methodology aims to combine theoretical knowledge, practical applications, quantitative data, and expert insights to provide a comprehensive understanding of the machine tool operation in the framework of Industry 4.0, applying these tools to research new manufacturing processes.
RESULTS
The system model was made of blocks. Each one contains the corresponding structure for the system to work based on the requirements and the analysis previously carried out. This model is included in the block "3PRS+XY+C_Logical_Root". The modelling tool used is the Modelica Software.
The Set_Point block was modelled, establishing the drive through the passive joints of the 3PRS system. Here it is set the desired position and velocity for each degree of freedom. The position and velocity values are delivered by the "kinematicPTP" block using a matrix arrangement. Figure 11 shows the block diagram that emits the twelve operation signals.

Figure 11. Internal Set Point Block Diagram. Own work.
The simulation was carried out in the "CATIA-Functional &Logical Design" environment "with the "Simulate" tool of "Behaviours". A test was carried out around the starting point of the system. A step type change was made as boot. Immediately after this step signal, a decreasing position change signal was configured with speed and acceleration to represent a smoother behaviour. Figure 12 shows the position signal delivered as a reference, which has been simulated for six seconds.
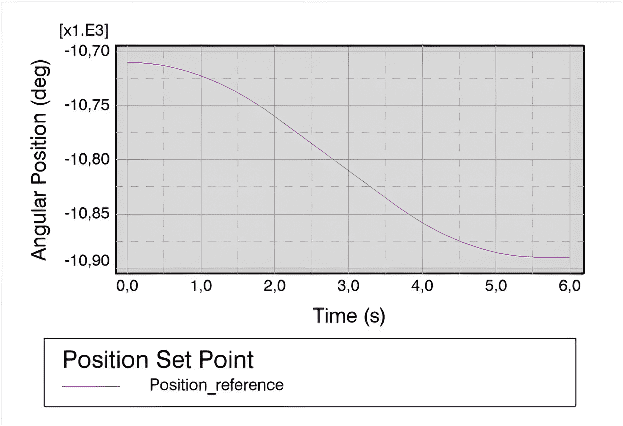
Figure 12. Position reference signal. Own work.
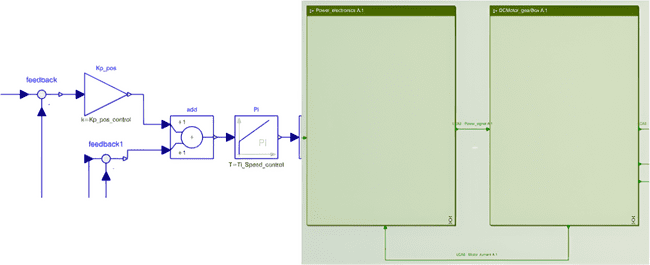
Subsequently, the structure of the position and speed controller for an actuator was defined. A P-PI cascade control was carried out for position and velocity, respectively. The control parameters are managed by variables managed from the requirements. Figure 13 shows the parameterised controller, operating point, and feedback signals as inputs. These blocks contain the current controller, the electromotive circuit model, and the mechanical characteristics of the motor and its reduction gearbox. The power signals sent to the motor and the current as feedback to the control circuit are handled. The signals shown in Figure13b (with enlarged capture) are "Power_signal", which contains the power reference sent to the actuator, and "Motor_current", which feeds back the current value.
 |
|
|---|---|
| (a) | (b) |
Figure 13. a) Dynamic control diagram. Own work. b) Actuator Model Blocks. Own work.
The 3PRS+XY+C_Machine block describes the complete model of the mechanical system (structure, joints and tool). It is divided into internal blocks that contain the mechanical information of each designed part and the engineering connections made in CATIA-Mechanical Systems Design. Figure 14 shows the signals and the block that includes the mechanical model of the system. The six signals from each actuator feed the model.
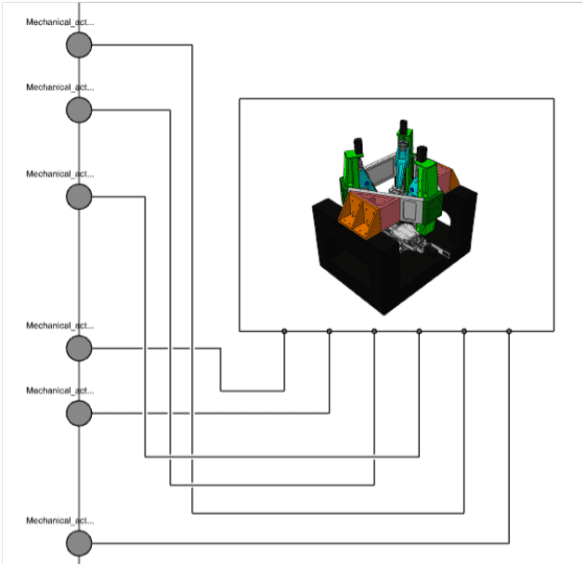
Figure 14. Mechanical model connection block. Own work.
It should be considered that the realisation of digital twins always starts from a functional design and the necessary elements, considering the joints on which the mechanism is actuated for the completion of the mechanical model. The mechanical representation must be configured so that the drive matches the behaviour model from the actuator.
The design of this digital twin can be used to create different models thanks to its modular design. However, it is necessary to implement a database system in the cloud to manage the data from the physical system. This would allow the implementation of an artificial intelligence failure detection system that results in a predictive maintenance system for the equipment.
All these developments would allow the implementation of a production system based on demand to avoid the excessive use of storage through market behaviour prediction strategies with artificial intelligence.
CONCLUSIONS
The findings underscore that implementing Industry 4.0 requires a holistic approach, including technological advancements, strategic planning, and human-centric considerations. Manufacturing organisations are encouraged to understand and embrace these changes, recognising that the transformation to Industry 4.0 is not simply a technological shift but a complete business transformation.
The digital twin design meets the similarity requirements to the real 3PRS+XY+C machine. It has been built respecting the drive mode of the physical system, its characteristics, properties and behaviours. The alternative chosen as a solution (3DExperience) meets the necessary tools for creating a digital model: database management for requirements, design of parts, creation of assemblies, design of behaviour models, simulation and graphic obtaining.
The assembly complies with the movement characteristics and restricts the singularities of the 3PRS mechanism. It has 6 degrees of freedom per the requirements and is activated in its passive joints, respecting the dynamic analysis. The configured mechanical representation and the set of designed models allow the dynamic simulation of the system from a position and velocity input established as the operating point.
The relationship of parameters between requirements and model allows us to make changes to the digital twin from the Enovia manager.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest within this research, authorship, and/or publication of this article.
REFERENCES
Ardito, L., Petruzzelli, A. M., Panniello, U., & Garavelli, A. C. (2019). Towards Industry 4.0: Mapping digital technologies for supply chain management-marketing integration. Business Process Management Journal, 25(2), 323–346. https://doi.org/10.1108/BPMJ-04-2017-0088
Boyes, H., Hallaq, B., Cunningham, J., & Watson, T. (2018). The industrial internet of things (IIoT): An analysis framework. Computers in Industry, 101, 1–12. https://doi.org/10.1016/J.COMPIND.2018.04.015
Cronin, C., Conway, A., & Walsh, J. (2019). Flexible manufacturing systems using IIoT in the automotive sector. Procedia Manufacturing, 38, 1652–1659. https://doi.org/10.1016/j.promfg.2020.01.119
Fajardo-Pruna, M., López-Estrada, L., Pérez, H., Diez, E., & Vizán, A. (2019). Analysis of a single-edge micro cutting process in a hybrid parallel-serial machine tool. International Journal of Mechanical Sciences, 151(August 2018), 222–235. https://doi.org/10.1016/j.ijmecsci.2018.11.023
Gurjanov, A. V., Shukalov, A. V., Zakoldaev, D. A., & Zharinov, I. O. (2020). Synthesis of self-reconfigurable manufacturing systems in engineering. Journal of Physics: Conference Series, 1515(4). https://doi.org/10.1088/1742-6596/1515/4/042071
Lee, J., Bagheri, B., & Kao, H. A. (2015). A Cyber-Physical Systems architecture for Industry 4.0-based manufacturing systems. Manufacturing Letters, 3, 18–23. https://doi.org/10.1016/J.MFGLET.2014.12.001
Leminen, S., Rajahonka, M., Wendelin, R., & Westerlund, M. (2020). Industrial internet of things business models in the machine-to-machine context. Industrial Marketing Management, 84, 298–311. https://doi.org/10.1016/j.indmarman.2019.08.008
López-Estrada, L., Fajardo-Pruna, M., Gualoto-Condor, S., Ríos, J., & Vizán, A. (2019). Creation of a micro cutting machine tool digital-twin using a cloud-based model-based PLM Platform: first results. Procedia Manufacturing, 41, 137–144. https://doi.org/10.1016/j.promfg.2019.07.039
López-Estrada, L., Fajardo-Pruna, M., Sánchez-González, L., Pérez, H., Fernández-Robles, L., & Vizán, A. (2018). Design and Implementation of a Stereo Vision System on an Innovative 6DOF Single-Edge Machining Device for Tool Tip Localization and Path Correction. Sensors, 18(9), 3132. https://doi.org/10.3390/s18093132
Lu, Y., Witherell, P., & Jones, A. (2020). Standard connections for IIoT empowered smart manufacturing. Manufacturing Letters, 26, 17–20. https://doi.org/10.1016/j.mfglet.2020.08.006
Munirathinam, S. (2020). Industry 4.0: Industrial Internet of Things (IIOT). In Advances in Computers (1st ed., Vol. 117, Issue 1). Elsevier Inc. https://doi.org/10.1016/bs.adcom.2019.10.010
Nunez-Montoya, B., Naranjo-Riofrio, C., Lopez-Estrada, L., Tutiven, C., Vidal, Y., & Fajardo-Pruna, M. (2022). Development of a Wind Turbine Digital-Twin for failure prognosis: First Results. 2022 5th International Conference on Advanced Systems and Emergent Technologies (IC_ASET), 29–33. https://doi.org/10.1109/IC_ASET53395.2022.9765858
Oks, S. J., Jalowski, M., Fritzsche, A., & Möslein, K. M. (2019). Cyber-physical modeling and simulation: A reference architecture for designing demonstrators for industrial cyber-physical systems. Procedia CIRP, 84, 257–264. https://doi.org/10.1016/J.PROCIR.2019.04.239
QRAPP Technology Ltd. (2023). Industrial Internet of Things. https://www.qrapp.org.uk/iot-industrial
Rodriguez-Lucas, L., Ning, C., Fajardo-Pruna, M., & Yang, Y. (2021). Study of Vortex Systems as a Method to Weakening the Urban Heat Islands within the Financial District in Large Cities. Sustainability 2021, Vol. 13, Page 13206, 13(23), 13206. https://doi.org/10.3390/SU132313206
Singh, I., Centea, D., & Elbestawi, M. (2019). IoT, IIoT and Cyber-Physical Systems Integration in the SEPT Learning Factory. Procedia Manufacturing, 31, 116–122. https://doi.org/10.1016/j.promfg.2019.03.019
Sleiti, A. K., Kapat, J. S., & Vesely, L. (2022). Digital twin in energy industry: Proposed robust digital twin for power plant and other complex capital-intensive large engineering systems. Energy Reports, 8, 3704–3726. https://doi.org/10.1016/J.EGYR.2022.02.305
Stăncioiu, A. (2017). The Fourth Industrial Revolution “Industry 4.0.” Fiabilitate Şi Durabilitate, 1(19), 74–78. https://doaj.org/article/e5e51203902847c4b2ce675c38932db1
TECHNIA (US). (2021). How to Use the 3DEXPERIENCE Platform: Features and Advantages. https://www.technia.us/blog/how-to-use-the-3dexperience-platform-features-and-advantages/
Tutivén, C., Benalcazar-Parra, C., Encalada-Dávila, A., Vidal, Y., Puruncajas, B., & Fajardo, M. (2021). Wind turbine main bearing condition monitoring via convolutional autoencoder neural networks. International Conference on Electrical, Computer, Communications and Mechatronics Engineering, ICECCME 2021. https://doi.org/10.1109/ICECCME52200.2021.9590937
United Nations Industrial Development Organization. (2016). Industry 4.0. Opportunities and Challenges of the New Industrial Revolution for Developing Countries and Economies in Transition. 2030 Agenda and the Sustainable Development Goals (SDGs). https://doi.org/10.1007/978-1-4842-2047-4
Vaidya, S., Ambad, P., & Bhosle, S. (2018). Industry 4.0 – A Glimpse. Procedia Manufacturing, 20, 233–238. https://doi.org/10.1016/J.PROMFG.2018.02.034